



堆垛机货叉原理图
在自动化立体仓库中,堆垛机是实现货物“空间搬运”的核心设备,而货叉则是其直接与货物交互的“手”——精准伸缩、稳定承载、高效取放的背后,都藏在堆垛机货叉的原理图之中。这张融合了机械结构与控制逻辑的图纸,不仅是货叉设计制造的基准,更是理解其工作本质的关键。本文将以原理图为核心,拆解堆垛机货叉的结构组成、工作机制与技术逻辑。
一、堆垛机货叉的核心结构:原理图中的“硬件基石”
堆垛机货叉的原理图首先清晰标注了其模块化组成,各单元既独立承担功能,又协同完成动作。根据伸缩能力,货叉可分为固定货叉(无伸缩功能)和伸缩货叉(主流类型),后者的原理图结构更具代表性,主要包含五大核心单元。
1. 基础承载单元:固定货叉(一级货叉)
固定货叉是整个货叉系统的“基座”,在原理图中通常以“L型钢板焊接结构”呈现,水平段用于承载货物,垂直段通过螺栓与堆垛机的升降台或载货台刚性连接。其核心作用是传递载荷——将货物重量与伸缩机构的反作用力传导至堆垛机主体,因此原理图中会特别标注其材质(多为高强度合金钢)与承重加强筋的分布,确保承载稳定性。
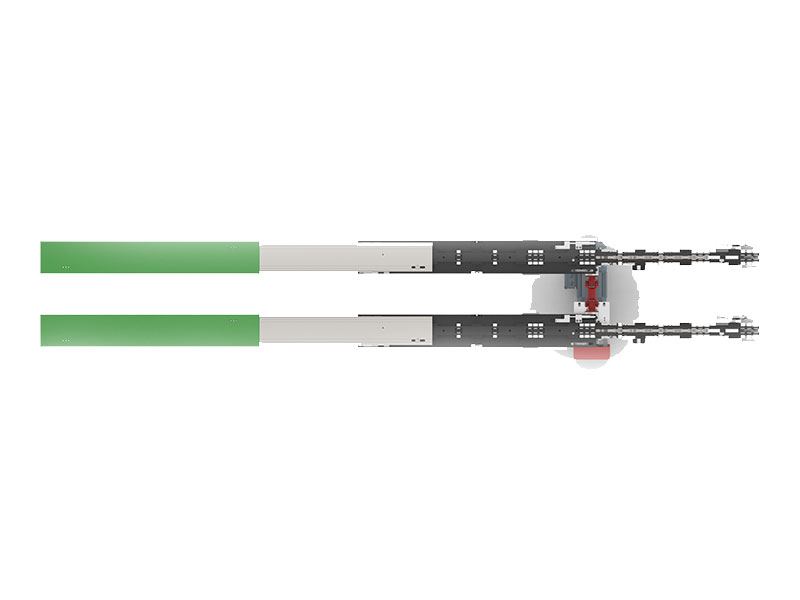
2. 伸缩执行单元:伸缩货叉(二级/三级货叉)
伸缩货叉是实现“货物进出货位”的核心,原理图中采用“嵌套式分级结构”设计,分为二级货叉(仅一次伸缩)和三级货叉(可二次伸缩,适配双深位货架)。
- 二级货叉:位于固定货叉内侧,通过滚轮与固定货叉的导轨配合,可沿固定货叉长度方向滑动;
- 三级货叉(伸缩叉头):嵌套于二级货叉内侧,是直接插入托盘底孔的部件,其末端通常设计有“导向斜面”,在原理图中会标注斜面角度(多为15°-30°),用于快速对准托盘。
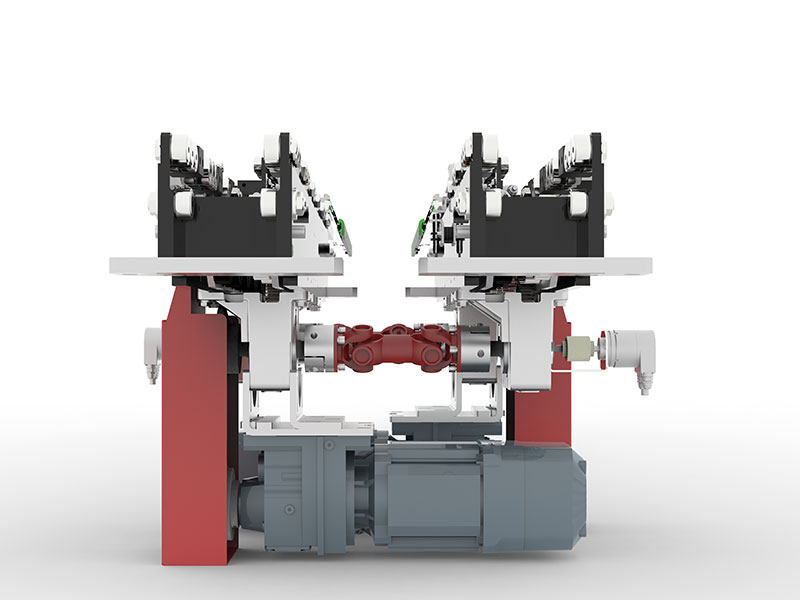
3. 动力驱动单元:驱动机构
驱动机构是货叉伸缩的“动力源”,原理图中最常见的是**链条驱动**(中轻型载荷)和**齿轮齿条驱动**(重型载荷),其中链条驱动的原理图结构更典型:
- 动力源:步进电机或伺服电机,原理图中会标注电机功率与转速,匹配货叉的伸缩速度需求;
- 传动组件:电机通过减速器连接主动链轮,主动链轮驱动牵引链条,链条一端固定于三级货叉末端,另一端通过从动链轮绕回,形成“闭环传动”;
- 同步结构:双叉臂设计的货叉中,原理图会特别标注“同步轴”,确保两侧链条转速一致,避免货叉偏移。
4. 精度保障单元:导向与限位机构
货叉的伸缩精度直接决定货物取放的准确性,原理图中通过两类机构实现:
- 导向机构:固定货叉与二级货叉、二级货叉与三级货叉之间,会标注“滚轮组”或“滑块导轨”,滚轮组通常为“上下双列布局”,限制货叉的垂直晃动;
- 限位机构:在货叉伸缩的“极限位置”(完全伸出/完全缩回),原理图会标注“机械限位开关”和“电子编码器”,前者用于紧急制动,后者用于实时反馈货叉位置(精度可达±1mm)。
5. 安全保护单元:检测与防护机构
为避免货叉与货架、货物碰撞,原理图中集成了多重安全组件:
- 货叉到位检测:在伸缩行程的关键位置(如取货位、放货位)设置光电传感器,标注其“检测距离”与“响应时间”;
- 过载保护:电机回路中串联“过载保护器”,原理图中会标注保护阈值,当货叉负载超过额定值时自动断电;
- 防护结构:货叉外侧设计有“防尘罩”,原理图中会标注其密封等级,适配仓库的粉尘环境。
二、原理图视角下的工作流程:货叉的“动作闭环”
堆垛机货叉的工作过程是“结构与控制的协同”,结合原理图可拆解为6个核心步骤,每个步骤都对应明确的机构动作:
1. 初始待机阶段
货叉处于“完全缩回”状态:三级货叉嵌套于二级货叉内,二级货叉缩回至固定货叉内侧,编码器反馈“零位信号”,电机处于断电待机状态,限位开关触发“缩回到位”信号。
2. 对准货位阶段
堆垛机通过升降台调整高度、行走机构调整水平位置,使固定货叉的中心线与目标货位的托盘中心线对齐。此时原理图中“货位对准传感器”触发信号,告知控制系统“可执行伸叉动作”。
3. 伸叉取货阶段
控制系统发送“伸叉指令”,伺服电机启动,通过链条传动驱动二级货叉、三级货叉依次伸出:
- 一级伸叉:主动链轮转动,牵引链条拉动三级货叉先伸出,当三级货叉伸出至极限时,链条带动二级货叉继续伸出;
- 到位检测:当三级货叉完全插入托盘底孔(通常插入深度为托盘长度的2/3以上),“取货位传感器”触发,电机停止转动,伸叉动作结束。
4. 取货与缩叉阶段
堆垛机升降台轻微起升(通常升高5-10mm),将货物与货架分离,随后控制系统发送“缩叉指令”:电机反转,链条拉动三级货叉、二级货叉依次缩回,编码器实时反馈位置,确保货物精准回移至载货台中心。
5. 移位与对准目标位阶段
堆垛机通过行走机构移动至目标货架通道,升降台调整至目标层高,再次通过“货位对准传感器”确认货叉与目标货位对齐。
6. 放货与复位阶段
重复“伸叉动作”,将货物送至目标货位上方,升降台轻微下降使货物落至货架,随后货叉依次缩回,编码器反馈“完全缩回”信号,整个取放流程闭环,货叉回归待机状态。

三、原理图背后的技术逻辑:性能与场景的适配
堆垛机货叉的原理图并非“通用模板”,而是根据仓储需求定制,核心技术参数的差异直接体现在图纸设计中:
技术参数 | 轻型货叉(≤1t)原理图特征 | 重型货叉(≥5t)原理图特征 |
驱动方式 | 标注小型伺服电机 + 链条传动 | 标注大功率减速电机 + 齿轮齿条传动 |
导向机构 | 标注单排滚轮组 | 标注双排滑块导轨 + 润滑系统 |
定位精度 | 编码器标注 ±2mm | 编码器标注 ±0.5mm + 激光定位辅助 |
伸缩速度 | 标注 100-200mm/s | 标注 50-100mm/s(优先保证稳定性) |
结构材质 | 标注 Q345 合金钢 | 标注 42CrMo 高强度合金钢 + 热处理工艺 |
例如,在自动化立体仓库的“双深位货架”场景中,原理图会采用“三级货叉”设计,其伸缩行程是固定货叉长度的1.8-2倍;而在“冷库仓储”场景中,原理图会标注“低温适配电机”和“耐低温润滑脂”,确保货叉在-25℃环境下正常工作。
四、发展趋势:堆垛机货叉原理图的“进化方向”
随着智能仓储向“高速化、智能化、模块化”发展,货叉原理图也在持续迭代,呈现三大新特征:
1. 智能化感知升级
传统原理图中的“点式传感器”逐渐被“面阵激光雷达”替代,图纸中会标注雷达的“扫描角度”与“识别精度”,可实时检测托盘是否变形、货物是否偏移,实现“自适应取放”。
2. 高速化结构优化
为匹配堆垛机的“快进快出”需求,原理图中开始采用“同步带传动”替代链条传动,标注“同步带张力调节机构”,减少传动间隙,使伸缩速度提升至300-500mm/s。
3. 模块化设计深化
原理图将货叉拆解为“驱动模块、伸缩模块、承载模块”,各模块通过标准化接口连接,标注“快速更换结构”,当某一模块故障时,无需整体拆卸即可维修,降低维护成本。
结语:原理图是货叉性能的“基因图谱”
堆垛机货叉的原理图看似是机械结构的线条组合,实则融合了机械设计、传动力学、控制工程与仓储场景需求。从结构标注到参数匹配,从动作流程到安全逻辑,每一处细节都决定了货叉的承载能力、伸缩精度与工作效率。理解这张“基因图谱”,不仅能掌握货叉的工作原理,更能看懂智能仓储设备“高效运转”的底层逻辑——而这正是自动化仓储实现“空间最大化、效率最优化”的核心密码。
- 相关产品
-
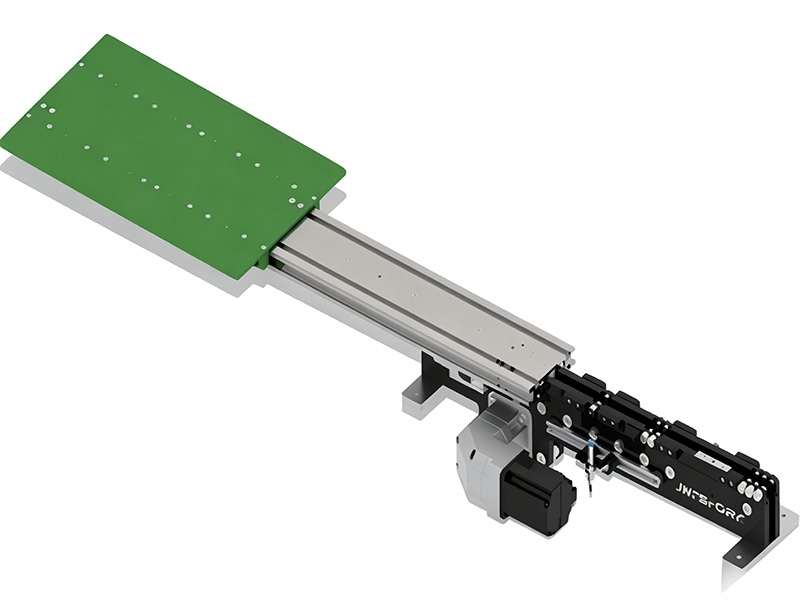
单电机伸缩货叉单电机伸缩货叉是智能仓储核心部件,适配堆垛机、AGV设备,单电机驱动多级同步伸缩,结构紧凑节能低耗。定位精度高、运行稳定故障率低,适配立体仓库、电商、医药等多场景仓储存取作业。查看详情
-
洁净伸缩货叉洁净伸缩货叉是智能仓储核心精密设备,采用全封闭防尘结构与高精度传动设计,符合ISO 1洁净标准。适配半导体晶圆、生物医药、精密电子无尘转运,定位精准、低形变易维护,适配无人化智能工厂作业。查看详情
-
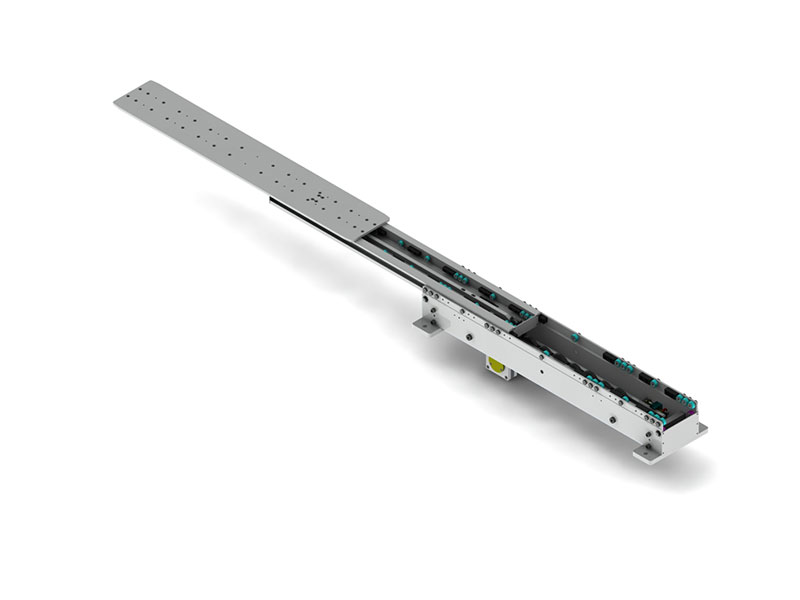
单电机单深位伸缩货叉单电机单深位伸缩货叉为自动化仓储通用配套设备,采用单电机三级伸缩结构,结构简洁、定位精准、运维简单、运行安全,适用于立体仓库、物流中心、智能制造及冷链仓储等自动化作业场景。查看详情
- 相关案例
-
 半导体行业智能化立体仓库解决方案
半导体行业智能化立体仓库解决方案智能化立体仓库解决方案旨在提高半导体产品的存储效率、降低运营成本,并确保产品的质量和安全。该方案通过集成堆垛机、自动化输送系统、智能货架、仓库管理系统(WMS)等关键组件,实现货物的快速存取、精准定位和高效管理。
-
 四向穿梭车智能化立体仓库解决方案
四向穿梭车智能化立体仓库解决方案四向穿梭车智能化立体仓库解决方案融合硬件设备与智能系统,实现高密度存储、自动化作业,大幅提升空间利用率与效率,降低人工及运营成本,适配电商、制造等多行业,助力仓储数字化升级。
-
 智驱货叉新变革:全场景伸缩货叉智能化系统解决方案
智驱货叉新变革:全场景伸缩货叉智能化系统解决方案全场景伸缩货叉智能化系统解决方案以 “感知 - 决策 - 执行” 闭环为核心,集成伺服驱动、多维度感知与 AI 算法,适配仓储、制造、冷链等多场景。实现毫米级定位、效率提升 30%-50%,兼具预测性维护与柔性适配,赋能物流供应链降本增效。
-
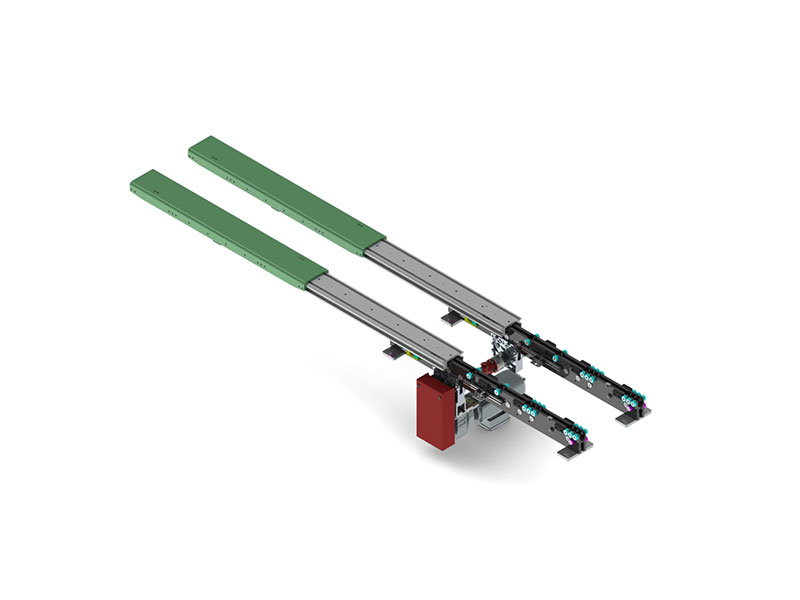
 堆垛机单电机双深位伸缩货叉整体解决方案
堆垛机单电机双深位伸缩货叉整体解决方案堆垛机单电机双深位伸缩货叉智能化方案,以单电机驱动降能耗、双深位设计提仓储密度,搭配智能控制与故障预测,适配电商 / 制造业 / 冷链,实现存储容量升 50%、能耗降 25%、故障停机减 90%,助力立体仓库高效运营。